| Робота Cody надо водить за руку |
| Автоматизация - Робототехника |
|
Для управления мобильным роботом есть несколько способов. Наиболее распространенный – дистанционное управление посредством пульта. Будущие действия робота тщательно программируются с возможностью оперативной корректировки. Скорость движения, встречи с препятствиями, действия с различными предметами – все это продумывают разработчики программного обеспечения, пытаясь спрогнозировать поведение робота в конкретной ситуации. Робот Коди (Cody), созданный в Технической Лаборатории Робототехники Здравоохранения Джорджии (Georgia Tech’s Healthcare Robotics Lab) (США), отличается в этом плане тем, что его можно научить двигаться по определенному маршруту и выполнять определенные действия, даже не прибегая к программированию. Достаточно взять робота за руку и провести туда, куда он должен будет ходить. Робот Коди способен запомнить свой маршрут, чтобы после повторить его. Во время испытаний в больнице – а именно для помощи медицинскому персоналу был создан робот Коди – его учили ориентироваться на коридорах больницы медсестры. Смотрите на видео, как это было. По мысли разработчиков такой способ адаптации робота к конкретным условиям места его работы позволит избежать многих сложностей. Робот Коди создан на базе мобильной основы Segway RMP 50 и имеет вполне внушительные способности. Так, робот умеет самостоятельно открывать входные двери, выдвигать ящики стола или распахивать дверцы шкафчиков. Разработка интерфейса для робота Коди принадлежит Тиффэни Чену (Tiffany Chen) и профессору Чарли Кемпу (Charlie Kemp). Он был недавно представлен на конференции Human-Robot Interaction (HRI2010), которая проходила в середине марта в Японии. |

| Читайте: |
|---|
Теория АСУ:
Что такое система PLC Из самого названия данного класса становится ясно, что основным компонентом системы является программируемый логический контроллер. Системы класса PLC чрезвычайно хороши для управления последователь... |
Программируемые логические контроллеры компании Контэл Производственная компания «Контэл» с 2000 года специализируется на разработке и производстве аппаратно-программных средств для создания систем промышленной автоматики. Одной из видов продукции, я... |
Диспетчеризация подсистемы электроснабжения Подсистема электроснабжения представляет собой составную часть любого здания, будь то инженерные, жилые или административно-производственные коммуникации. Высокая надежность и эффективность электрос... |
Применение автоматизированных тепловых пунктов - ключ к энергосбережению в систе Существующие системы централизованного теплоснабжения были спроектированы в условиях социалистического хозяйства, и этот факт в значительной степени определяет их низкую энергетическую эффективность... |
Системы диспетчеризации объектов и визуализация процессов Любое современное здание, будь это жилой дом, торговый офисный, центр, или спортивное сооружение обязательно содержит солидный объем инженерного оборудования. Причем число инженерного оборудования н... |
Оборудования в АСУ:
Многокомпонентное дозирование в приготовлении комбикорм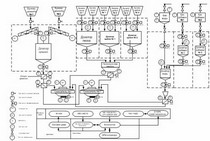 Недавно началась промышленная эксплуатация завода ЗАО «Неокорм» по производству премиксов в г. Лакинск Владимирской области.[1] ... |
Некоторые особенности дозаторов Дозаторы инертных материалов песка и щебня (рис.3.) имеют ряд особенностей. Дозирующие заслонки установлены на раме с возможнос... |
Управление процессом:
Системы автоматизации зданий. Диспетчеризация инженерны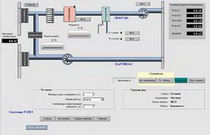 В данном разделе приведены примеры проектов систем автоматизации зданий и диспетчеризации зданий. Здесь представлена информация ... |
АСУ ТП химцеха ТЭЦ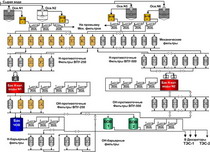 Структура АСУ ТП В качестве ПТК предлагается несколько вариантов, основанных на программном продукте Master SCADA, реализующи... |






