| Летающий робот приземляется на электрические провода |
| Автоматизация - Робототехника |
|
Беспилотные летательные аппараты – роботы – уже научились летать как управляемые человеком самолеты. Разработчики из Массачусетского технологического института решили научить их еще и приземляться как птицы – например, на провода линий электропередач. Для огромных лайнеров или боевых самолетов-разведчиков такая идея выглядит весьма смехотворно. А вот для небольшим легким роботам беспилотникам это вполне под силу. Зачем? А хотя бы для подзарядки аккумуляторов. Мы уже писали про робот планер на солнечных батареях, который две недели кружил над американской военной базой. Но солнечные батареи не подходят миниатюрным летающим роботам. Почему бы автоматически не подзарядиться от высоковольтной линии? Остается «мелочь» - разработать систему приземления в определенную точку. Примерно так, как это получается у Евразийской орлиной совы. Самая большая сложность, с которой столкнулись разработчики этой технологии – преодоление аэродинамических воздушных потоков при приземлении. Для этого крылья роботизированного планера должны изменять свое положение в полете. Перед посадкой датчики определяют силу ветра и задают автопилоту параметры уклона крыла. Специальная компьютерная программа высчитывает алгоритм поведения робота. Чтобы испытать поведение летающего беспилотника в «реальных» условиях, исследователи Массачусетского технологического института поместили его в аэродинамическую трубу. Оптимальная скорость полета планера была выбрана 6-8,5 м/сек. Воссозданы воздушные потоки на высоте 3,5 м. Реальный результат исследований можно посмотреть на видео, где изображение замедлено в 15 раз. Сейчас исследователи работают над тем, чтобы упростить систему вычислений алгоритма поведения робота беспилотника при посадке. Пока она является достаточно сложной, чтобы полностью доверить её «бортовому» автопилоту. Этой уникальной разработкой некоторое время очень интересовались ВВС США, которые и финансировали проект. |

| Читайте: |
|---|
Теория АСУ:
Подсистема ввода/вывода Подсистема ввода/вывода – состоит из аппаратных модулей ввода/вывода. Модули различаются по типу электрического сигнала (с помощью которого они взаимодействуют с полевыми приборами) и по направлению... |
О проблемах качества Но большое разнообразие имеет не только достоинства, но и порождает массу проблем. Я имею в виду не только то, что глаза разбегаются, но и отсутствие объективной информации по предлагаемой технике. ... |
Перечень модулей ввода/вывода серии MAТCHBOX MMB500-CPU Процессорный модуль 16-разрядный процессор Fujitsu MMB510-4DI Модуль дискретного ввода 24 в, 4 канала ММВ511-2DI Модуль дискретного ... |
Регулятор в современных АСУ ТП. ПИД-регулятор Что такое регулятор? Этот термин пришел из теории автоматизированного управления. Регулятором называется устройство, которое следит за функционированием объекта управления и, постоянно анализируя ег... |
Комплексная автоматизация технологических процессов Техническое перевооружение и реконструкция производства кроме решения задач проектирования и внедрения новых технологических процессов предусматривает также в качестве основного средства интенсифика... |
Оборудования в АСУ:
Многокомпонентное дозирование в приготовлении комбикорм Недавно началась промышленная эксплуатация завода ЗАО «Неокорм» по производству премиксов в г. Лакинск Владимирской области.[1] ... |
Некоторые особенности дозаторов Дозаторы инертных материалов песка и щебня (рис.3.) имеют ряд особенностей. Дозирующие заслонки установлены на раме с возможнос... |
Управление процессом:
Система мониторинга и управления электрооборудованием с Объект автоматизации: Реализована диспетчеризация и удаленное управление системами электрооборудования и отдельными агрегатами с... |
Автоматизация установки формообразования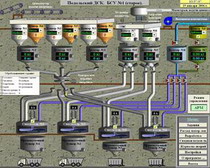 Объектом автоматизации и контроля являются процессы, происходящие при формовании стального листа на установке формообразования. ... |






