| Personal Mobility Robot |
| Автоматизация - Робототехника |
|
Персональный мобильный робот (Personal Mobility Robot, PMR) является инвалидной коляской. Машина, разработанная компанией Toyota, имеет ручной контроллер Wii, с помощью которого пользователь управляет мобильной машиной. Недавно разработчики из Лаборатории робототехники (JSK Robotics Laboratory) Токийского университета под руководством профессора Масаюки Инаба (Masayuki Inaba) решили обновить машину, используя для управления Wii-пульт дистанционного управления. PMR является одним из видов двухколесных роботов, наподобие Segway. Преимущество самобалансирующихся двухколесных машин в том, что они занимают меньше, по сравнению с 4-колесными, а также малый диаметр разворота, что удобно в условиях ограниченного пространства. Исследователи разработали машину, чтобы помочь пожилым людям и людям с инвалидностью стать по-прежнему независимыми и мобильными. Машина весит 150 кг и может двигаться со скоростью до 6 км/час даже склонах и неровных поверхностях. Машина принимает нижнее положение и позволяет водителю взобраться на сиденье. Затем он поднимает пациента, маленькие колеса спереди и сзади предназначены для безопасности, в случае, если машина будет опрокидываться. В дополнение к Wii-котролллеру разработчики работают над современной системой навигации с использованием экрана компьютера, на котором можно будет видеть траекторию движения, и с помощью которого можно будет управлять движением. Навигационная система работает на двух портативных компьютерах в режиме реального времени, по одному для управления движением, а другой – для планирования траектории движения. Лазерные датчики и алгоритмы обнаружения людей и окружающих объектов позволяют различать статические и движущиеся препятствия. Система может быстро обнаружить пешеходов, которые вдруг начинают двигаться, а также людей, появляющихся из «мертвых зон». В этом случае робот может поступить двумя способами: пересчитать траекторию, чтобы избежать столкновения, или остановиться на несколько секунд, подождать, а затем продолжить движение снова. Навигационная система при планировании траектории обозначает кругами все вершины статических объектов, а затем пытается нарисовать непрерывную линию, которая является касательной к окружности, при этом проходя поэтапно переходя от исходного положения к месту назначения. При наличии множества возможных маршрутов система использует собственный алгоритм для определения конкретного пути: Вы можете увидеть визуальное представление этого подхода на рисунках. Разработчики планируют разработать более компактную модель робота для внутреннего использования – весом до 45 кг и с управлением за счет смещения тела, как у Segway. Кстати, мы совсем недавно писали о мобильной робоколяске, разработаной тоже в Японии. |

| Читайте: |
|---|
Теория АСУ:
Блочные тепловые пункты Теплообменники сейчас необходимы на большинстве промышленных заводов. Теплообменники позволяют порядочно сэкономить в строительных работах (охлаждение битумных смесей и других растворов). Высокая пр... |
Автоматизация технологических процессов Автоматизация технологического процесса – совокупность методов и средств, предназначенная для реализации системы или систем, позволяющих осуществлять управление самим технологическим процессом без н... |
Контрольно-измерительные приборы - КИП. Классификация, характеристики, контроль, Контрольно-измерительные приборы можно классифицировать по следующим основным признакам: по роду измеряемой величины, способу получения информации, метрологическому назначению, расположению. По р... |
Диспетчеризация подсистемы водоснабжения Подсистема водоснабжения осуществляет, управление работой насосов, контролируя, при этом, поддержание необходимого давления или уровня. |
Автоматизация производства Автоматизация производства. Введение в Автоматизацию и общие понятия. Автоматизация производства, процесс в развитии машинного производства, при котором функции управления и контроля, ранее выпол... |
Оборудования в АСУ:
Многокомпонентное дозирование в приготовлении комбикорм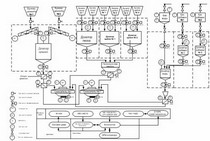 Недавно началась промышленная эксплуатация завода ЗАО «Неокорм» по производству премиксов в г. Лакинск Владимирской области.[1] ... |
Некоторые особенности дозаторов Дозаторы инертных материалов песка и щебня (рис.3.) имеют ряд особенностей. Дозирующие заслонки установлены на раме с возможнос... |
Управление процессом:
АСУ ТП производства комбикормов, премиксов и пищевых пр Назначение Программно-технический комплекс дозировочно смесительной станции (ПТК «Тензо-ДСС») является основой автоматизирова... |
Автоматизация установок ИКМ и ИМ-1 для контроля антиоки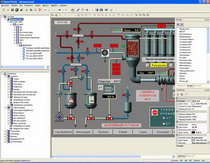 Установки ИКМ предназначены для оценки антиокислительных свойств масел по методу ГОСТ 20457-75, а на ИМ-1 проводятся моторные и... |






