| Подводный робот с шестью ластами |
| Автоматизация - Робототехника |
|
Доктор Грегори Дудек с командой из Университета Макгилла в Монреале, Канада, разработали автономный подводный аппарат AQUA2. Подводный робот AQUA2, может исследовать глубины до 35 метров на небольшом расстоянии от береговой линии. Робот может быть привязан к «базе» волоконно-оптическим или другим проводом. Легкий и портативный AQUA2 имеет 6 независимо управляемых «круговых» ласт и, несмотря на свою квадратную форму, может: плавать и зависать в воде, выходить на сушу; робот имеет возможность проводить подводные съемки, моделировать 3D-изображения и т.п. Причем, учитывая конструкцию робота, можно отметить, что он не представляет особой опасности для человека под водой. Разработчики считают, что этот робот можно использовать для широкого круга задач: в экологической инспекции, исследованиях и стерео реконструкции окружающей среды и в построении подводных карт; в обеспечении задач национальной обороны и т.п. ТТХ подводного автономного аппарата: - Шесть автономно работающих ног (ласт). - Глубина погружения – до 35 метров. - Система управления: две цифровые камеры; два процессора для управления двигателем и стереовидения, программное обеспечение для движения и визуальной локализации; автономный пульт управления оператора для эксплуатации с помощью оптоволоконного провода. - Беспроводной Ethernet: 802.11g. - Аккумуляторы: две аккумуляторные батареи обеспечивают 5 часов общего времени работы. - Дополнительные опции: блок хранения изображений; различные тросы; легкий и прочный ноутбук для управления, маршрутизатор; набор специализированных ног. |

| Читайте: |
|---|
Теория АСУ:
Контроль измерительных приборов Для обеспечения единообразия, верности и правильного применения мер и измерительных приборов установлен определенный порядок их контроля. Для этой цели организована Государственная служба мер и изме... |
Технические средства автоматизации производств История развития технических средств автоматизации а также сформировавшаяся структура определяющаяся их назначением. Средства формирования, передачи, первичной обработки и автоматического извлечения... |
Принцип погодозависимого регулирования Поясним, каким образом осуществляется поддержание комнатной температуры с учетом изменений уличной. При настройке контроллера устанавливается так называемая температурная кривая, отражающая зависимо... |
Классификация АСУ ТП В зарубежной литературе можно встретить довольно интересную классификацию АСУ ТП, в соответствие с которой все АСУ ТП делятся на три глобальных класса: • SCADA (Supervisory Control and Data Acqui... |
Основные принципы и правила построения схем управления и сигнализации Принципиальные электрические схемы отражают принципы действия систем управления, сигнализации, измерения, регулирования и взаимодействие между отдельными элементами системы, а также способ электропи... |
Оборудования в АСУ:
Многокомпонентное дозирование в приготовлении комбикорм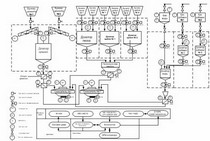 Недавно началась промышленная эксплуатация завода ЗАО «Неокорм» по производству премиксов в г. Лакинск Владимирской области.[1] ... |
Некоторые особенности дозаторов Дозаторы инертных материалов песка и щебня (рис.3.) имеют ряд особенностей. Дозирующие заслонки установлены на раме с возможнос... |
Управление процессом:
Автоматизированная система управления технологическим п АСУ ТП ПА обеспечивает: Состав АСУ ТП ПА Дозатор битума представляет собой уникальную конструкцию, предусматривающую раз... |
АСУТП комбикормового завода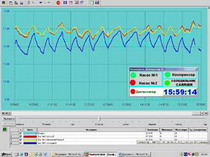 Система управления предназначена для автоматизации управления всем технологическим оборудованием комбикормового завода или цеха.... |