| Парковка робоавтомобиля с 180-градусным заносом |
| Автоматизация - Робототехника |
|
Команда разработчиков из Стендфорда (Stanford Racing Team) заняла второе место в гонках автороботов DARPA Urban Challenge еще в 2007 году. И все продолжает развивать автономные машины. Так, Зико Колтер (Zico Kolter) и его коллеги недавно показали видео одного из самых экстремальных трюков, исполненных робо-автомобилем. Они научили машину Junior парковаться со 180-градусным заносом. В общем, это происходит так: автономный автомобиль двигается задним ходом со скоростью около 25 миль в час (40 км/час), а потом резко ударяет по тормозам, выворачивает колеса и со 180-градусным заносом паркуется в нужном месте. Конечно, дело не только в парковке, но и в том, чтобы научить автономные автомобили действовать в непредвиденных ситуациях. Однако надежно осуществить такой трюк нелегко. Ведь автомобиль Junior обычно действует в режиме реального времени, используя различные датчики и в соответствии с контуром обратной связи, что позволяет постоянно корректировать движение автомобиля. Это хорошо работает при движении автономного автомобиля по прямой линии, где физическая модель движения автомобиля довольно проста. Но, когда автомобиль попадает в сложную ситуацию, эта простая модель не позволяет ему уверенно двигаться, и нужна более сложная динамическая модель движения автомобиля. Кстати, на видео ниже показаны три попытки, первые две – неудачные, а третья – «прямо в цель». Причем при тестировании разработчики использовали конусы, а не реальные автомобили. Так, на всякий случай. Интересно, сколько автомобилей в реальности мог бы разбить такой робот при своих парковках? Видимо много. Так что этому роботу еще нужно много учиться, учиться, учиться… |

| Читайте: |
|---|
Теория АСУ:
Инерция Самые современные материалы и технологии позволяют лишь сократить инерцию. При стандартной автоматике ее минимизирует использование котлов со стальным теплообменником. Основным недостатком их явл... |
Использование знаний Отмечается также развитие и системной интеграции. Руководители современных компаний начинают осознавать, что созданные собственными силами в кустарных условиях информационные системы не могут удовле... |
Автоматизированных средств управления и регулирования производственных процессов В СССР освоение автоматизированных средств управления и регулирования производственных процессов началось одновременно с созданием тяжёлой промышленности и машиностроения и проводилось в соответстви... |
Индивидуальные тепловые пункты Индивидуальные тепловые пункты обеспечивают помещения и здания горячей водой, вентиляцию и тепло целому строению, либо его частям. ИТП эксплуатируют как на промышленных предприятиях, так и в засе... |
Рекомендации по планированию и строительству газовой котельной 1. Требования к помещению котельной Высота потолков — не ниже 2,5 м. Площадь — не менее 4 кв. м на каждый котел |
Оборудования в АСУ:
Многокомпонентное дозирование в приготовлении комбикорм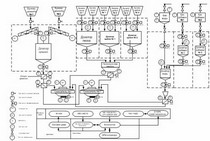 Недавно началась промышленная эксплуатация завода ЗАО «Неокорм» по производству премиксов в г. Лакинск Владимирской области.[1] ... |
Некоторые особенности дозаторов Дозаторы инертных материалов песка и щебня (рис.3.) имеют ряд особенностей. Дозирующие заслонки установлены на раме с возможнос... |
Управление процессом:
Автоматизация установки ПЭВ для определения моющих свой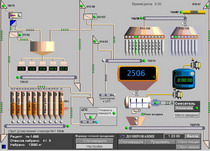 Одноцилиндровая установка ПЗВ предназначена для определения моющих свойств моторных масел с присадками путем испытания масла на ... |
Системы автоматизации котельных Объектом автоматизации является котельная, в состав которой входят водогрейные, либо паровые котлы, газорегуляторная установка, ... |