| Подводные роботы сторожат Мексиканский залив от нефти |
| Автоматизация - Робототехника |
|
Авария на нефтяной скважине в Мексиканском заливе не на шутку взбудоражила экологов по всему миру. Американцы же срочно решили призвать на помощь роботов. Уже неделю прибрежные воды в районе города Ки-Уэст (Key West) в радиусе 20 милей бороздит морской исследовательский робот Nemo. Это автономное подводное транспортное средство (UAV - Underwater Autonomous Vehicle) Лаборатория Морских исследований специально взяла напрокат в университете Rutgers. Во вторник (25.05.2010) на помощь ему отправился второй аналогичный подводный робот Waldo. Он «состоит на службе» непосредственно в Лаборатории Морских исследований в Сарасоте. До этого Waldo «охотился» на красных бактерий в Мексиканском заливе. Автоматизированные исследовательские аппараты анализируют содержание различных примесей в морской воде. Прежде всего, датчики роботов настроены на обнаружение составляющих нефти и химических веществ, вредных для экосистемы Мексиканского залива. В частности – диспергатора Corexit, специального химического вещества, которое британская компания Бритиш Петролеум, владелец аварийной нефтяной скважины, применяла для «рассеивания» нефти. Corexit очень сильно разрушает коралловые рифы. Приборы снимают показания каждые четыре минуты и каждые четыре часа через спутниковую связь передают данные на берег. Исследовательские датчики роботов «пробивают» воду на глубину до 27 метров (90 футов). Если окажется, что в воде присутствует что-то опасное, в данный район тут же оправится десант из ученых, чтобы взять более подробные пробы воды. Океанологи все чаще прибегают к услугам подводных роботов для исследования океанских глубин. Ранее мы уже писали про автономное подводное транспортное средство Скарлет Найт. Этот робот избороздил поперек весь Атлантический океан. |

| Читайте: |
|---|
Теория АСУ:
Теория автоматического управления ТАУ Теория автоматического управления (ТАУ) изучает принципы построения систем автоматического управления и закономерности протекающих в них процессов, которые она исследует на динамических моделях дейс... |
Отопление больших помещений с помощью газа Когда мы говорим об отоплении промышленных помещений, большинство специалистов сразу думает о большой котельной, трубах, вентиляторных конвекторах, регулирующих клапанах, вентиляторах и т.д. Устойчи... |
Использования систем Правило второе. Нужно обладать информацией о системах, которые Вы собираетесь использовать. Рассмотрим различия на примере котельных пунктов. Современные котельные монтируются на базе одноконтурн... |
Введение в теорию регулирования С началом индустриализации назрела насущная необходимость в более точных методах измерения и самих мерах. Одним из первых шагов в этом направлении стала заключенная в 1875 году в Париже Метрическая ... |
Контроль измерительных приборов Для обеспечения единообразия, верности и правильного применения мер и измерительных приборов установлен определенный порядок их контроля. Для этой цели организована Государственная служба мер и изме... |
Оборудования в АСУ:
Многокомпонентное дозирование в приготовлении комбикорм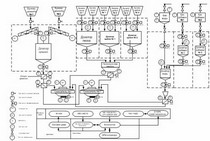 Недавно началась промышленная эксплуатация завода ЗАО «Неокорм» по производству премиксов в г. Лакинск Владимирской области.[1] ... |
Некоторые особенности дозаторов Дозаторы инертных материалов песка и щебня (рис.3.) имеют ряд особенностей. Дозирующие заслонки установлены на раме с возможнос... |
Управление процессом:
Автоматизация комплекса зданий Объект: Автоматизация комплекса зданий (22 корпуса жилых и служебных помещений, пос. Солнечное Ленинградской области), принадлеж... |
Автоматизированная система управления технологическим п АСУ ТП ПА обеспечивает: Состав АСУ ТП ПА Дозатор битума представляет собой уникальную конструкцию, предусматривающую раз... |