| Робот поставил рекорд длительности ходьбы |
| Автоматизация - Робототехника |
|
Очередной рекорд длительности хода ногами установлен роботом Ranger. Робот был создан инженерами из Корнельского университета (Cornell University). Робот прошел расстояние 14.3 миль (23, 01 км) примерно за 11 часов. Робот Ranger прошел по круговой трассе длиной 212 метров почти 109 раз. Можно подсчитать, что средняя скорость робота составила 1.3 миль в час, а робот сделал в общей сложности около 70 000 шагов. Кстати, такая продолжительность хода доказывает не только, что у данного робота была очень сильная батарея, но и то, что используемый им стиль ходьбы является достаточно энергоэкономичным. Рекорд робота Ranger в 14,3 миль (23, 01 км) превышает бывший мировой рекорд, поставленный роботом BigDog компании Boston Dynamics, которые прошел раньше 12,8 км. Одна из целей этих исследований – разработка принципов энергоэффективности таких машин, изучения механики ходьбы. Информация может быть использована в реабилитации, протезировании людей, а также в улучшении спортивных результатов. В отличие от других шагающих роботов, которые используют двигатели для контроля за каждым движением, Рейнджер имитирует человеческую походку, с использованием силы тяжести и импульса, позволяющим ему передвигать ноги. Правда, походка робота похоже на походку человека на костылях, и при этом робот перемещается на четырех ногах, одновременно передвигая две ноги. |

| Читайте: |
|---|
Теория АСУ:
Контрольно-измерительные приборы - КИП. Классификация, характеристики, контроль, Контрольно-измерительные приборы можно классифицировать по следующим основным признакам: по роду измеряемой величины, способу получения информации, метрологическому назначению, расположению. По р... |
Применение автоматизированных тепловых пунктов - ключ к энергосбережению в систе Существующие системы централизованного теплоснабжения были спроектированы в условиях социалистического хозяйства, и этот факт в значительной степени определяет их низкую энергетическую эффективность... |
Общность управления процессов в технике Н. Винеру принадлежала мысль об общности процессов управления в технике, живых организмах и в экономике и необходимости совместной деятельности учёных различных специальностей. Этот вывод подготовля... |
Интегральная составляющая Для устранения статической ошибки вводится интегральная составляющая. Она позволяет регулятору «учиться» на предыдущем опыте. Если система не испытывает внешних возмущений, то через некоторое время ... |
Отопление - позитивные изменения последних лет Недавно встретил школьного приятеля, которого не видел лет семь-восемь, и удивился - как он успел измениться за эти годы. При этом другой школьный друг, с которым я общался на протяжении этих лет по... |
Оборудования в АСУ:
Многокомпонентное дозирование в приготовлении комбикорм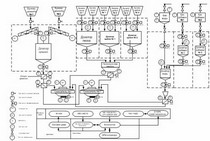 Недавно началась промышленная эксплуатация завода ЗАО «Неокорм» по производству премиксов в г. Лакинск Владимирской области.[1] ... |
Некоторые особенности дозаторов Дозаторы инертных материалов песка и щебня (рис.3.) имеют ряд особенностей. Дозирующие заслонки установлены на раме с возможнос... |
Управление процессом:
АСУ ТП ЦЕХА ПРЕДВАРИТЕЛЬНЫХ СМЕСЕЙ КОМБИКОРМОВОГО ЗАВОД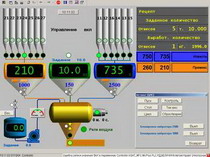 Функции Технические характеристики Комплектность Пульт управления. Управляющий контроллер. Измерительный механизм, встра... |
Автоматизация установок ИКМ и ИМ-1 для контроля антиоки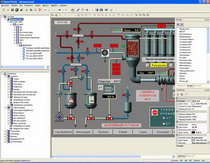 Установки ИКМ предназначены для оценки антиокислительных свойств масел по методу ГОСТ 20457-75, а на ИМ-1 проводятся моторные и... |






