| Роботу Hanako можно вырвать зубы |
| Автоматизация - Робототехника |
|
Мы уже писали о японском роботе, которого создали в качестве тренажера для обучения медперсонала лечить больных, зараженных «свиным гриппом». На это раз три японских университета (Waseda, Kogakuin и Showa) вместе с компанией Tmsuk разработали робота для обучения дантистов. Обращаться к зубным врачам – процедура не из приятных. От профессионализма стоматолога зависит не только количество и качество болевых ощущений пациента, но и то, как часто человеку потребуется наведываться в зубопротезное отделение в будущем. Сколько операций в полости рта живых людей надо провести врачу-стоматологу, чтобы стать профессионалом? А если речь идет только о студентах медицинских институтов?! Тут сколько не смотри, как это делает профессор-консультант, пока сам не попробуешь поработать бормашиной, толку не будет. Робот Ханако (Hanako) идеально подходит для этой процедуры. Его рост 157 сантиметров – как у среднего японца. В теле робота девять подвижных механических суставов, которые позволяют имитировать движения человека, находящегося в стоматологическом кресле. Причем, двигаются у Ханако челюсти, язык и даже веки. Вся полость рта робота буквально утыкана чувствительными датчиками. Всякий раз, когда студент совершает какую-нибудь ошибку во время «контрольного» лечения зубов, робот выражает свое недовольство, имитируя реакцию живого человека на боль и неприятные ощущения. Например, закатить глаза. Робот Хонако умеет постепенно сжимать челюсти, как это делает человек, который устал долго сидеть с открытым ртом. В полости рта при этом образуется нечто вроде слюны. Робот Ханако уже успешно практикует в качестве врачебного тренажера будущих дантистов. Только в марте 2010 года его использовали для обучения и экзамена около 90 студентов японских студентов-медиков. |

| Читайте: |
|---|
Теория АСУ:
Отопление больших помещений с помощью газа Когда мы говорим об отоплении промышленных помещений, большинство специалистов сразу думает о большой котельной, трубах, вентиляторных конвекторах, регулирующих клапанах, вентиляторах и т.д. Устойчи... |
Автоматизированных средств управления и регулирования производственных процессов В СССР освоение автоматизированных средств управления и регулирования производственных процессов началось одновременно с созданием тяжёлой промышленности и машиностроения и проводилось в соответстви... |
Сервисные функции Чистый воздух. Для снижения количества вредных выбросов в воздух многофункциональная автоматика способна оптимизировать работу горелки. В установочных параметрах современных контроллеров минимальная... |
Управление отношением (ratio control) Иногда стабилизация отношения между двумя или большим количеством переменных процесса более значима, чем стабилизация их абсолютных значений. В таких случаях используются системы пропорционального у... |
Средства измерения физических величин состоят из мер и измерительных приборов Мерой называется физическое тело, вещество или устройство, предназначенное для конкретного воспроизведения единицы измерений, либо ее кратного или дольного значения (например, гири, измерительные ко... |
Оборудования в АСУ:
Многокомпонентное дозирование в приготовлении комбикорм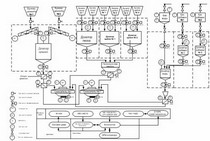 Недавно началась промышленная эксплуатация завода ЗАО «Неокорм» по производству премиксов в г. Лакинск Владимирской области.[1] ... |
Некоторые особенности дозаторов Дозаторы инертных материалов песка и щебня (рис.3.) имеют ряд особенностей. Дозирующие заслонки установлены на раме с возможнос... |
Управление процессом:
Система мониторинга и управления электрооборудованием с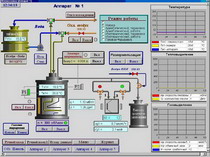 Объект автоматизации: Реализована диспетчеризация и удаленное управление системами электрооборудования и отдельными агрегатами с... |
Система контроля линий по выпуску оптического кабеля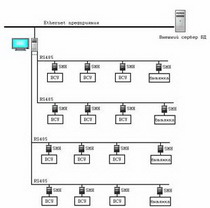 Объектом автоматизации является установка водооборотного снабжения, включая холодильное оборудование, компрессоры и насосы, вход... |






