| Американцы включили робота в состав космического экипажа |
| Автоматизация - Робототехника |
|
Про уникальные способности робота Robonaut 2 мы уже писали. Разработчики из NASA и General Motors представили его еще в феврале 2010 года. Тогда же прозвучало сообщение, что в перспективе робот будет помогать астронавтам в космосе. На минувшей неделе представители NASA официально объявили, что Robonaut 2 войдет в состав экипажа космического челнока «Дискавери», который в сентябре 2010 года отправится к Международной Космической Станции. По замыслу исследователей робот будет выполнять несложные процедуры, которые необходимо и одновременно неудобно выполнять астронавтам. Именно поэтому разработчики уделили так много внимания рукам робота. Каждая обладает 14 степенями свободы и снабжена множеством датчиков. По своим функциональным возможностям они вполне схожи с руками скрипача или пианиста. Во время тестовых испытаний Robonaut 2 аккуратно складывал бумажные листы, доставал «письма» из конвертов и безупречно выполнял множество разных манипуляций с хрупкими предметами. В то же время на вытянутой руке робот вполне может удерживать груз до 9 килограмм. По внешнему виду он напоминает фантастического мотоциклиста без ног: вместо головы – шлем, вместо нижних конечностей – мобильная платформа. Да и зачем роботу ноги в невесомости?! Сейчас исследователи проверяют, как Robonaut 2 будет «чувствовать себя» в безвоздушном пространстве при наличии большого радиационного фона. Стоит учитывать еще и огромные физические перегрузки, которым подвергаются астронавты при запуске космического корабля. Например, чтобы проверить, как их будет переносить робот, его в разобранном виде долго трясли в специальном шейкере. Если испытания робота на орбитальной станции пройдут успешно, в следующий раз его вполне могут выпустить в открытый космос. И без скафандра, который значительно усложняет свободу действий астронавтов! Вот только сможет ли робонавт делать за бортом то, что делают люди? |

| Читайте: |
|---|
Теория АСУ:
Теория автоматического управления ТАУ Теория автоматического управления (ТАУ) изучает принципы построения систем автоматического управления и закономерности протекающих в них процессов, которые она исследует на динамических моделях дейс... |
Регулирование температуры воды в подающем трубопроводе В этом случае осуществляется регулирование температуры в подающем трубопроводе, которая является регулируемой величиной. Она косвенным образом влияет на температуру в помещении. Регулирование позвол... |
Системы диспетчеризации объектов и визуализация процессов Любое современное здание, будь это жилой дом, торговый офисный, центр, или спортивное сооружение обязательно содержит солидный объем инженерного оборудования. Причем число инженерного оборудования н... |
Программируемые логические контроллеры компании Контэл Производственная компания «Контэл» с 2000 года специализируется на разработке и производстве аппаратно-программных средств для создания систем промышленной автоматики. Одной из видов продукции, я... |
Блочные тепловые пункты Теплообменники сейчас необходимы на большинстве промышленных заводов. Теплообменники позволяют порядочно сэкономить в строительных работах (охлаждение битумных смесей и других растворов). Высокая пр... |
Оборудования в АСУ:
Многокомпонентное дозирование в приготовлении комбикорм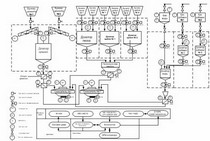 Недавно началась промышленная эксплуатация завода ЗАО «Неокорм» по производству премиксов в г. Лакинск Владимирской области.[1] ... |
Некоторые особенности дозаторов Дозаторы инертных материалов песка и щебня (рис.3.) имеют ряд особенностей. Дозирующие заслонки установлены на раме с возможнос... |
Управление процессом:
Комплект оборудования для автоматизации комбикормового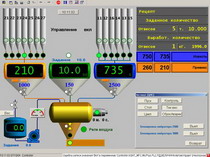 · операторские станции АСУ ТП (офисные или промышленные компьютеры), установленные на рабочих местах операторов предприятия · ... |
Автоматизация машины круглоткацкой МКТ-2 Целью автоматизации являлась замена физически изношенной и морально устаревшей системы управления уникальной круглоткацкой машин... |






