| Робот вертолет поймал наркоторговцев |
| Автоматизация - Робототехника |
|
Новая разработка американских военных – робот вертолет Fire Scout (Огневой бойскаут) – с октября 2009 года проходил тестовые испытания на корабле «McInerney» ВМС США. В начале апреля 2010 года морской фрегат патрулировал воды Карибского моря, когда его радары засекли быстроходный катер контрабандистов. Огромному судну не угнаться за маневренным легким катером. Военные решили опробовать в реальном деле робот вертолет Fire Scout, оснащенный оборудованием для слежения за движущимися объектами. Взлетевший с палубы корабля робот три часа «вел» в море катер контрабандистов, постоянно сообщая на фрегат место своего расположения. За это время к месту дисклокации катера «подтянулись» силы береговой охраны, которые и задержали контрабандистов. На борту катера оказалось 60 килограмм кокаина. Еще 200 килограмм наркоторговцы выбросили в море, когда поняли, что им не оторваться от робота преследователя. Роботы вертолеты Fire Scout – это автоматизированная версия небольшого коммерческого вертолета, который американские военные используют для различных целей. В зависимости от необходимости роботы могут быть оснащены видеокамерами, разного рода датчиками для ведения разведки с воздуха или пушками и противотанковыми ракетами. Компания производитель Northrop сконструировала версию робота вертолета Fire Scout специально для военно-морских сил и береговой охраны США. Робот изначально предназначался для специализированного быстроходного судна, которое должно патрулировать прибрежные воды. Но после того, как в разработке нового корабля обнаружили неполадки, роботы вертолеты переместили на уже действующие авианосцы, чтобы продолжить испытания. Поиск контрабандистов в открытом море – одна из задач летающего робота, с которой, как выяснилось, он успешно справляется. |

| Читайте: |
|---|
Теория АСУ:
Системы автоматического управления Совокупность взаимодействующих управляющего устройства и управляемого объекта образует систему автоматического управления, которая делится на: · -Системы автоматического регулирования; · -Сл... |
Пользовательские функции К пользовательским функциям прежде всего относятся различные программы отопления, которые позволяют адаптировать режим обогрева дома к ритму жизни его обитателей (сон и бодрствование, отпуска, посме... |
Малобюджетный вариант СМС-диспетчеризации. Контроллер РС-420, работающий по GSM Одним из направлений работы компании Контэл (г. Владимир) является разработка и производство систем, программного обеспечения и приборов для мониторинга промышленных объектов, работающих без постоян... |
Образцовые и эталонные рабочие приборы По метрологическому назначению приборы делятся на рабочие, образцовые и эталонные. Рабочие приборы подразделяются на технические и лабораторные. Первые предназначены для практических целей измере... |
Средства автоматизации Технологическое оборудование и коммуникации автоматизируемого объекта изображают на схеме автоматизации упрощенно, но в такой степени, которая позволяет показать их взаимное расположение, взаимодейс... |
Оборудования в АСУ:
Многокомпонентное дозирование в приготовлении комбикорм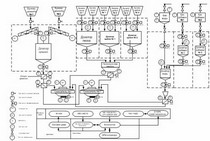 Недавно началась промышленная эксплуатация завода ЗАО «Неокорм» по производству премиксов в г. Лакинск Владимирской области.[1] ... |
Некоторые особенности дозаторов Дозаторы инертных материалов песка и щебня (рис.3.) имеют ряд особенностей. Дозирующие заслонки установлены на раме с возможнос... |
Управление процессом:
АСУ ТП головных водозаборных сооружений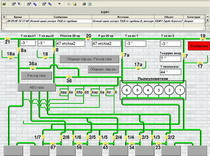 Объектом управления и контроля является технологическое оборудование артезианских скважин (общее число 80 скважин), находящееся ... |
АСУТП БЕТОНОСМЕСИТЕЛЬНОГО УЗЛА Назначение АСУТП БСУ (в дальнейшем система) предназначена для улучшения качества производимого бетона, повышения уровня живучес... |