


| Автоматизированная система управления мобильным центром обработки данных компании |
| Системы управления - Управление технологическим процессом |
|
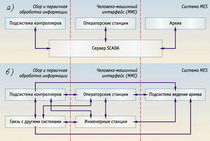
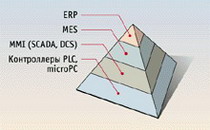
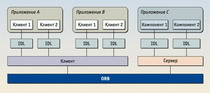
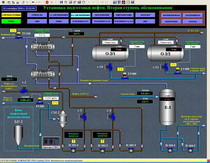
Характеристика объекта управления: МЦОД имеетряд преимуществ по сравнению со стандартным дата-центром, таких как: мобильность, возможность быстрого запуска в случае перемещения на новое место и использования в качестве модульного, легко масштабируемого решения. Чтобы гарантировать стабильную работу активного оборудования дата-центра (серверы, системы хранения данных), необходимо обеспечить нормальные условия (климат, электропитание, безопасность) для его функционирования. Достичь таких условий позволяет инженерный комплекс здания (помещения), состоящий из систем прецизионного кондиционирования, бесперебойного энергоснабжения, контроля доступа и пожаротушения. Результаты внедрения:С помощью системы MasterSCADA компании ЧЕРУС удалось реализовать концепцию «необитаемого» ЦОД. Система диспетчерского управления позволяет дистанционно контролировать работу инженерных систем мобильного ЦОД, оперативно отслеживать сбои, предупреждая развитие аварийных ситуаций в превентивном режиме. Автоматизированные системы управления технологическими процессами Появление автоматизированных систем управления технологическими процессами (АСУТП) стало следствием синтеза и встречного развития автоматизированных систем управления (АСУ) и локальной автоматики. АСУ Термин АСУ появился в момент, когда в системы управления для решения различных задач начали внедрять вычислительную технику. Типовая АСУ вначале выглядела как двухуровневая система: нижний уровень отвечал за сбор информации, а верхний - за принятие решения. Поток информации поступал от объекта управления оператору, который обменивался данными с ЭВМ и осуществлял управление объектом. Вычислительные мощности использовались лишь для того, чтобы облегчить оператору или диспетчеру обработку поступающей информации. В качестве объекта управления могли подразумеваться как технические средства, так и производственные структуры, между которыми с точки зрения теории автоматизации нет принципиальной разницы. Отличие появилось только в названии: автоматизированное управление производством (предприятием) стали обозначать АСУП, автоматизированное управление техническими средствами и процессами - АСУТП. Первые АСУТП создавались путем объединения с уже созданными телемеханическими системами ЭВМ, причем оператор становился одновременно и оператором ЭВМ, и диспетчером телемеханической системы. Однако до эпохи персональных компьютеров один оператор был не в состоянии - в дополнение к своим непосредственным обязанностям по управлению телемеханической системой - справляться еще и с управлением ЭВМ, которая зачастую требовала внимания значительно большего, чем телемеханическая система. Поэтому теоретические разработки таких АСУТП весьма редко воплощались на практике, да и то лишь в тех областях, где экономический эффект от внедрения ЭВМ в технологический процесс не имел решающего значения (космическая, военная сферы). По мере развития и удешевления вычислительной техники пути дальнейшего развития АСУТП стали очевидными: попытаться возложить на ЭВМ часть функций, выполняемых оператором. Однако описанная выше структурная схема уже не соответствовала этим задачам, и попытки ее модернизировать, добавив поток информации от объекта непосредственно к ЭВМ и управление объектом при помощи ЭВМ, минуя оператора, сразу же выявили ее неработоспособность. ЭВМ не способна воспринимать входную информацию в том же виде, что и оператор, как не способна непосредственно управлять технологическим процессом. Попытки преобразовывать сигналы для ввода и адаптировать управление с учетом требований ЭВМ приводили к усложнению и удорожанию системы, что не всегда оправдывало сами усовершенствования. Такая ситуация (по крайней мере в Советском Союзе) существовала примерно до середины 80-х годов. Локальная автоматика Локальная автоматика развивалась от выполнения частных задач управления одним процессом или объектом к управлению комплексом из нескольких процессов или объектов. Комплекс технических средств, обеспечивающих автоматическое функционирование группы технологических процессов или технических средств, получил название системы автоматического управления (САУ). САУ предполагают функционирование процесса без вмешательства человека. Первые САУ реализовывались на аналоговых регуляторах и релейных схемах автоматического управления и были довольно широко распространены и успешно применялись как в качестве небольших узлов автоматического управления, так и в больших телемеханических системах. Однако попытки создать полностью автоматическую, большую (более 100 контролируемых и управляемых параметров) телемеханическую систему при помощи аналоговой автоматики и релейных схем управления приводили к тому, что зачастую физический объем и стоимость такой системы оказывались значительно больше, чем у самого объекта (или группы объектов) управления. Да и надежность таких систем была невелика. Поэтому параллельно с автоматической системой управления всегда создавалось ручное управление, что, естественно, не способствовало ни упрощению, ни удешевлению оборудования. Релейные схемы управления легко поддаются моделированию программными средствами, поэтому было вполне естественно попытаться использовать для этих целей вычислительную технику. Такая возможность возникла с появлением мини - и микроЭВМ. И здесь встала уже знакомая проблема адаптации, только в данном случае вычислительной техники к локальной автоматике. При построении снизу реальная работоспособность АСУТП оказалась той же, что и при построении сверху . Движение навстречу Развитие АСУ и локальной автоматики шло во встречных направлениях, но до определенного момента теоретически хорошо разработанные схемы построения АСУТП с двухуровневой архитектурой на практике оказывались или слишком сложными и дорогими, или неработоспособными. Чтобы эти два направления «встретились», потребовалось целенаправленное развитие средств автоматизации, в первую очередь в плане совместимости датчиков и исполнительных механизмов с цифровой аппаратурой обработки данных. Необходимо было и преодолеть такое важное ограничение, как высокая стоимость вычислительной техники. Наиболее приемлемым решением обеих проблем сразу стало создание программируемых управляющих микропроцессорных контроллеров. Программируемые контроллеры, будучи по своей сути цифровыми (а значит, легко совместимыми с управляющими машинами верхнего уровня), имеют специализированные блоки для управления и связи со всевозможными аналоговыми, дискретными и цифровыми датчиками и исполнительными механизмами. Широкое распространение контроллеров совпало по времени с началом распространения персональных компьютеров. Поэтому можно сказать, что простые и недорогие реально работающие автоматизированные системы управления технологическими процессами начали появляться в тот же момент, когда в повседневной жизни вместо термина ЭВМ начал употребляться термин персональный компьютер , или просто компьютер. С применением программируемых контроллеров типовая схема построения АСУТП приобрела вид цепочки: оператор - управляющий компьютер - управляющие программируемые контроллеры - датчики и исполнительные механизмы - объекты управления, где обмен информацией шел в обоих направлениях. При построении АСУТП по данной схеме оператор уже не может непосредственно влиять на технологический процесс, воспринимая информацию непосредственно с датчиков и управляя исполнительными механизмами. Хотя создание параллельного ручного управления в принципе возможно, но в нем нет необходимости, так как надежность системы в большинстве случаев достаточна, а аварийные ситуации могут отрабатываться как управляющим компьютером, так и программируемыми контроллерами. Такая архитектура АСУТП подразумевает, что каждый аппаратный уровень может принимать на себя часть функций иных уровней. Например, все функции управления технологическим процессом можно возложить на управляющие контроллеры, а компьютер верхнего уровня в этом случае будет только отображать ход процесса. Можно использовать контроллеры лишь как передаточное звено, а всем процессом будет управлять компьютер или даже оператор. На практике чаще всего функции обработки поступающей с датчиков информации и принятия управленческого решения распределены между управляющим компьютером и контроллерами; оператор задает лишь начальные условия технологического процесса и при необходимости корректирует сам процесс. Такая архитектура позволяет легко наращивать системы автоматизированного управления. Нет никаких принципиальных ограничений, запрещающих в случае необходимости одновременно управлять несколькими процессами или объединять несколько процессов в один. Компьютер верхнего уровня может быть соединен и с другими компьютерами, которые выполняют задачи, не связанные с технологическими процессами, например, функции бухгалтерии, отделов маркетинга, кадров и т.д. В таком случае АСУТП будет составлять часть одного из компонентов единой информационно-управляющей системы. АСУ сегодня В настоящее время такие системы представляют собой объект активных теоретических исследований. Исследователи, используя новый технологический уровень, вернулись к созданию моделей комплексной автоматизации процессов, производств и производственных структур. Единые открытые вычислительные системы позволяют управлять распределенными децентрализованными эволюционирующими структурами с ограниченным взаимодействием, способными поддерживать по мере потребностей механизм налаживания новых связей или углублять их взаимодействие. Все необходимые аппаратные средства для таких систем уже созданы или легко могут быть созданы. Активно разрабатывается для этих целей системо-независимое программное обеспечение. Главная проблема состоит в создании системы протоколов функционирования сети. Если решение задач бухгалтерских, маркетинговых и прочих офисных приложений успешно решается при помощи локальных компьютерных сетей, то привнесение в эту сеть задач АСУТП предъявляет новые требования к ее функционированию: возможность работы в режиме реального времени, максимальный приоритет при работе с объектом управления, надежность протоколов связи с объектами и самотестирование системы на предмет утери связи с контролируемым процессом. Что касается ПО непосредственно для АСУТП, то для создания автоматизированных технологических процессов существуют и успешно применяются пакеты, называемые в технической литературе SCADA-программами (Supervisory Control and Data Acquisition - диспетчерское управление и сбор данных). Эти программы позволяют обеспечить двустороннюю связь в реальном времени с объектом управления и контроля, визуализацию информации на экране монитора в любом удобном для оператора виде, контроль нештатных ситуаций, организацию удаленного доступа, хранение и обработку информации. SCADA-пакеты обеспечивают гибкость системы, поддерживают распределенную архитектуру, возможность разработки драйверов, масштабируемость, резервируемость, поддержку специализированных языков программирования. Микропроцессорные промышленные управляющие контроллеры также имеют собственные языки программирования, позволяющие описать конкретный процесс: это так называемые языки релейных схем со встроенными булевыми операциями. Контроллеры можно программировать и при помощи Ассемблера или языка высокого уровня, чаще всего C, с последующим компилированием и загрузкой управляющих программ в память контроллера. В настоящее время создание АСУТП, особенно небольших, не является чем-то исключительным. Наработаны типовые схемы, схемные и программные решения, используя которые разработчики даже не акцентируют внимание на том, что они создают АСУТП, - просто решаются текущие задачи управления оборудованием или процессом. Это свидетельствует о том, что автоматизация уже достигла той степени обыденности, что и, например, электрификация. Тем не менее новые применения или новые решения в этой области всегда привлекают внимание - вспомним хотя бы управление автоматической стиральной машиной через Интернет. |
Диспетчеризация пунктов:
АВТОМАТИЗИРОВАННАЯ СИСТЕМА ОПЕРАТИВНОГО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ КАНАЛИЗАЦИОННЫ Заказчик: МУП «Водоканал Воронежа», Воронеж Описание технологического процесса: Городские канализационные стоки попадают в приёмную ёмкость. При достижении уровнем в приёмной ёмкости определён... |
Автоматизированная система диспетчеризации и мониторинга Энергоучет сахарного к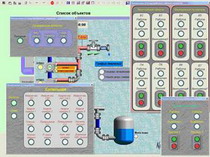 Объект контроля: Объектом контроля является технический учет всех материальных и энергопотоков сахарного комбината: газа, пара, воды, конденсата, сырья и продукции. Сахарный комбинат состоит из д... |
Автоматизированная система коммерческого учета отпуска питьевой воды потребителя В г. Новороссийске реализована перва очередь системы коммерческого учета питьевой воды. Функции системы: обеспечение приборного учета потребляемой питьевой воды каждым объектом водопотребления, о... |
Теория АСУ:
Классификация АСУ ТП В зарубежной литературе можно встретить довольно интересную классификацию АСУ ТП, в соответствие с которой все АСУ ТП делятся на три глобальных класса: • SCADA (Supervisory Control and Data Acqui... |
Автоматизация производства Автоматизация производства. Введение в Автоматизацию и общие понятия. Автоматизация производства, процесс в развитии машинного производства, при котором функции управления и контроля, ранее выпол... |
Дифференциальная составляющая Дифференциальная составляющая противодействует предполагаемым отклонениям регулируемой величины, как бы предугадывая поведение объекта в будущем. Эти отклонения могут быть спровоцированы внешними во... |
Структура комплексных систем диспетчеризации Стандартная система диспетчеризации состоит из шкафов автоматики (ША) и диспетчерского пункта. В свою очередь шкаф автоматики вмещает в себя свободно программируемый контроллер, оснащенный модулями ... |
История развития автоматизации Процесс автоматизации начался намного раньше чем нам могло бы казаться, автоматизация на самом деле появилась практически сразу же с возникновением производства, а само по себе производство существу... |
Оборудования в АСУ:
Многокомпонентное дозирование в приготовлении комбикорм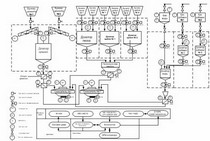 Недавно началась промышленная эксплуатация завода ЗАО «Неокорм» по производству премиксов в г. Лакинск Владимирской области.[1] ... |
Некоторые особенности дозаторов Дозаторы инертных материалов песка и щебня (рис.3.) имеют ряд особенностей. Дозирующие заслонки установлены на раме с возможнос... |
Управление процессом:
Автоматизация горнообогатительного производства. АСУ ТП Технологическая установка “Башня отбора проб” предназначена для определения выхода класса крупности более 25 мм и содержания же... |
Автоматизированная система управления бетоносмесительны АСУТП управляет бетоносмесительным узлом производительностью до 400 м3.сутки. Основнаой особенностью системы являются развитые с... |






