| «Космические ремонтники» тренируются на роботах |
| Автоматизация - Робототехника |
|
В качестве тренажеров роботы давно хорошо зарекомендовали себя в разных областях человеческой деятельности. Обратились к ним и создатели космических кораблей. Одной из проблем, над которыми работают сегодня конструкторы околоземных орбитальных спутников, является их «утилизация». На смену небольшим околоземным спутникам связи постепенно приходят стационарные орбитальные автоматизированные комплексы. Однако, когда у них кончается топливо (обычно это гелий или гидразин) или выходят из стоя солнечная батарея, гироскоп или другое оборудование, спутник превращается просто в космический мусор. Хотя при этом механические системы и электроника остаются в рабочем состоянии. Ремонтировать спутники в космосе пока не научились. Решение именно этой непростой задачи позволяет найти роботизированный тренажер EPOS, созданный разработчиками из DLR – научного сообщества, которое работает на «оборонку» Германии, типа американского NASA. Робот тренажер полностью моделирует ситуацию на орбите: приближение спутников, стыковку, маневры ремонтных работ. Предварительно все действия спутников рассчитываются в компьютерный программах. Сам тренажер EPOS представляет собой двух взаимодействующих роботов на площадке в 25 метров. Роботы имеют по 6 степеней свободы каждый, чтобы воспроизводить действия каждого спутника. При этом моделирование ситуации настолько приближено к реальности, что спутники «верят», будто находятся в невесомости на орбите Земли и «учитывают» присутствие Солнца. Роботы позволяют сконструировать даже поведение спутников, которые вращаются при движении вокруг своей оси. В настоящий момент роботы тренажера EPOS экспериментируют с моделями реальных спутников. Но в дальнейшем здесь предполагается тестировать будущих «космических ремонтников». На видео можно посмотреть тренажер EPOS в работе. |

| Читайте: |
|---|
Теория АСУ:
Контрольно-измерительные приборы - КИП. Классификация, характеристики, контроль, Контрольно-измерительные приборы можно классифицировать по следующим основным признакам: по роду измеряемой величины, способу получения информации, метрологическому назначению, расположению. По р... |
Рекомендации по планированию и строительству газовой котельной 1. Требования к помещению котельной Высота потолков — не ниже 2,5 м. Площадь — не менее 4 кв. м на каждый котел |
Подсистема ввода/вывода Подсистема ввода/вывода – состоит из аппаратных модулей ввода/вывода. Модули различаются по типу электрического сигнала (с помощью которого они взаимодействуют с полевыми приборами) и по направлению... |
Алгоритм - AMACONT Для дальнейшего использования такой методики, дополняющей основные методы расчёта, которые были изложены выше, требуется доказать, что величина кода (или уровня) механизации и автоматизации связана ... |
Структура комплексных систем диспетчеризации Стандартная система диспетчеризации состоит из шкафов автоматики (ША) и диспетчерского пункта. В свою очередь шкаф автоматики вмещает в себя свободно программируемый контроллер, оснащенный модулями ... |
Оборудования в АСУ:
Многокомпонентное дозирование в приготовлении комбикорм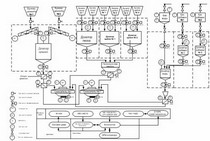 Недавно началась промышленная эксплуатация завода ЗАО «Неокорм» по производству премиксов в г. Лакинск Владимирской области.[1] ... |
Некоторые особенности дозаторов Дозаторы инертных материалов песка и щебня (рис.3.) имеют ряд особенностей. Дозирующие заслонки установлены на раме с возможнос... |
Управление процессом:
Автоматизация установки формообразования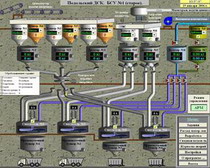 Объектом автоматизации и контроля являются процессы, происходящие при формовании стального листа на установке формообразования. ... |
АСУ ТП МНОГОКОМПОНЕНТНЫМИ ВЕСАМИ · Назначение Автоматическая система управления многокомпонентными весами ВМК-2500 (в дальнейшем система) предназначена для кон... |






