| Пнет ли робот лунный камень? |
| Автоматизация - Робототехника |
|
Любовь японских ученых к роботам-гуманоидам приобретает новые масштабы. Уже через пять лет, к 2015 году, человекообразный робот должен прогуляться по Луне. Об этом в конце апреля заявили представители японской ассоциации SOHLA. Разумеется, что для воплощения этих амбициозных планов придется преодолеть немало трудностей. Сложность лунного рельефа, структура грунта до сих пор заставляла разработчиков для передвижения исследовательских аппаратов использовать колеса. Это сегодня наиболее надежный и экономичный способ. Более того, он уже неоднократно испытан на практике. Достаточно вспомнить советские луноходы или американские аппараты для исследования марса. Японских исследователей трудности никогда не пугали. Инженеры сознают, что обеспечить уверенную и легкую походку их детищу – двуногому роботу-гуманоиду по имени «Мэйдо-кун» будет не просто. Трудности заключаются, например, в обеспечении равновесия робота при движении по сложному рельефу. Японское космическое агентство ДЖАКСА в аналогичном проекте сделало свой выбор на колесном варианте лунного исследовательского аппарата. Удаленность прямоходящего робота от центра управления не позволит обеспечить полноценное дистанционное управление из-за задержки сигнала. Его придется наделить умением самостоятельно выбирать маршрут и решать текущие задачи. Стоимость проекта тоже велика. На разработку робота Мэйдо планируется затратить около 10,5 млн. долларов. Первый проект ассоциации SOHLA – спутник для исследования молний «Maido-1» был успешно реализован и спутник в 2009 году вышел на орбиту. Можно ожидать, что в 2015 году и робот Мэйдо-кун будет деловито бродить по Луне, собирать лунные камни и не очень часто спотыкаться о внеземные неровности. |

| Читайте: |
|---|
Теория АСУ:
Как уехать на заработки в другую страну Среди украинцев поездки в близкое зарубежье очень популярны. Ведь там можно заработать неплохо и вернуться обеспеченным человеком. Кроме того, работа в чужой стране позволяет выучить язык, другую куль... |
Схемы обвязки котельной и принципы управления контурами Для того чтобы организовать работу одного или нескольких отопительных контуров в гидравлической системе, их необходимо присоединить к теплогенератору-котлу. Эту задачу можно решить разными способами... |
Методы автоматизации Методы автоматизации производства и научные основы автоматизации развиваются главным образом по 3 направлениям.Во-первых, разрабатывают методы эффективного изучения закономерностей объектов управлен... |
Автоматизированная система управления технологическим процессом АСУ ТП Автоматизированная система управления технологическим процессом (АСУ ТП) — комплекс программных и технических средств, предназначенный для автоматизации управления технологическим оборудованием на п... |
Диспетчеризация подсистемы водоснабжения Подсистема водоснабжения осуществляет, управление работой насосов, контролируя, при этом, поддержание необходимого давления или уровня. |
Оборудования в АСУ:
Многокомпонентное дозирование в приготовлении комбикорм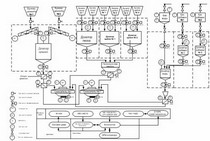 Недавно началась промышленная эксплуатация завода ЗАО «Неокорм» по производству премиксов в г. Лакинск Владимирской области.[1] ... |
Некоторые особенности дозаторов Дозаторы инертных материалов песка и щебня (рис.3.) имеют ряд особенностей. Дозирующие заслонки установлены на раме с возможнос... |
Управление процессом:
Система автоматизации технологического процесса произво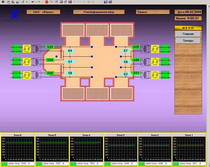 Система полностью автоматизирует технологический процесс, а так же ведет учет выпускаемой продукции. Работа оператора сводится к... |
Автоматизированное рабочее место оператора дозировочно- Ввод производственных заданий на выполнение, автоматизированный пуск и останов процессов подачи, дозирования, смешивания сырья и... |






