| Робот на колобке или колобок под роботом |
| Автоматизация - Робототехника |
|
Идею создать робота на шаре профессору Масаки Кумагаи (Masaaki Kumagai) подсказал один из его студентов в университете Tohoku Gakuin японского города Тагайо. Профессор Кумагаи возглавляет в этом учебном заведении Конструкторскую Лабораторию робототехники. Под его руководством здесь уже создали роботов, которые вертятся, ползают, передвигаются как животные на четырех конечностях, ходят как люди на двух ногах и даже катаются на роликовых коньках. В семидесятые годы прошлого века было несколько попыток заставить робота передвигаться на сферической поверхности. Наиболее известный из реализованных проектов – робот Ballbot, созданный исследователями из Carnegie Mellon. От английского названия шара получил свое имя и японский робот профессора Кумагаи – BallIP. Сам робот около полуметра высотой и весит 7,5 килограммов. Посредством трех вращающихся во все стороны колес он громоздится на обычном шаре для кегельбана, поверхность которого покрыта каучуком. Шар, диаметром 20 сантиметров, весит 3,6 килограмма. Двигатели NIDEC вращают колеса, колеса вращают шар, шар катится по полу. Два аналоговых гироскопа и акселерометры координируют постоянно вертикальное положение робота на шаре и не дают ему упасть. При этом даже если толкнуть робота или попытаться покачнуть его, он все равно займет прежнее вертикальное положение. Управление дистанционное с помощью 16-битного пульта. Одним из реальных преимуществ робота на сферической поверхности по сравнению с обычными «колесными» или «гусеничными» роботами, несомненно, является мобильность. Он ведь может разворачиваться на месте! На видео представлены некоторые возможности практического применения BallIP. Робот вполне уверенно держит на себе десятикилограммовый кирпич и перетаскивает громоздкую деревянную конструкцию. Не говоря уже о том, что роботу вполне будет под силу доставить хозяину «кофе в постель» или перетащить к машине сумки из супермаркета. Тем более, что профессор Кумагаи собирается сделать робота более легким и попробует объединить пару-тройку роботов BallIP для совместной плодотворной деятельности. |

| Читайте: |
|---|
Теория АСУ:
Автоматическая линия - общие понятия и применения Автоматическая линия, система машин, комплекс основного и вспомогательного оборудования, автоматически выполняющего в определённой технологической последовательности и с заданным ритмом весь процесс... |
Сети сжатого воздуха для приборов и средств Сети сжатого воздуха для приборов и средств автоматизации должны иметь буферные емкости, обеспечивающие часовой запас сжатого воздуха для работы. Эти требования не распространяются на установки, ... |
Управление отношением (ratio control) Иногда стабилизация отношения между двумя или большим количеством переменных процесса более значима, чем стабилизация их абсолютных значений. В таких случаях используются системы пропорционального у... |
Введение в теорию регулирования С началом индустриализации назрела насущная необходимость в более точных методах измерения и самих мерах. Одним из первых шагов в этом направлении стала заключенная в 1875 году в Париже Метрическая ... |
Модульные ПЛК MATCHBOX компании «Контэл» Это распределённый контроллер, в состав которого входят: модуль центрального процессора, модули входов/выходов, модули питания и коммуникационные модули. Передача данных между модулями осуществляетс... |
Оборудования в АСУ:
Многокомпонентное дозирование в приготовлении комбикорм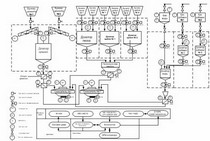 Недавно началась промышленная эксплуатация завода ЗАО «Неокорм» по производству премиксов в г. Лакинск Владимирской области.[1] ... |
Некоторые особенности дозаторов Дозаторы инертных материалов песка и щебня (рис.3.) имеют ряд особенностей. Дозирующие заслонки установлены на раме с возможнос... |
Управление процессом:
АСУ ТП МНОГОКОМПОНЕНТНЫМИ ВЕСАМИ · Назначение Автоматическая система управления многокомпонентными весами ВМК-2500 (в дальнейшем система) предназначена для кон... |
АСУТП котлоагрегата ТЭЦ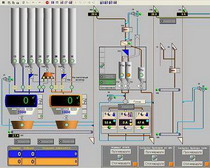 Полномасштабная АСУТП энергетического котла БКЗ-320. В состав включены система автоматического регулирования (САР) котлоагрегата... |






