| Робот для сканирования линий электропередач |
| Автоматизация - Робототехника |
|
Скоро роботы в Северной Америке будут ползать вдоль тысяч километров линий электропередач. Эти роботы будут проверять кабель на дефекты. Использование таких роботов исключает необходимость инспекции для человека и, в конечном счете, сэкономит массу времени и денег. Прототип, разработанный в научно-исследовательском институте (Electric Power Research Institute) движется на роликах в среднем со скоростью около 5 км/ч. Роботы будут получать питание в основном от электричества в проводе. Но роботы будут также использовать солнечные панели в качестве резервной системы электропитания. сли робот сможет инспектировать кабель со скоростью около 5 км/час, то себестоимость таких услуг будет гораздо дешевле, чем стоимость тех же работ, но выполняемых экипажем вертолета. Робот будет оснащен высококачественной камерой и датчиками, а сканер будет также проверять на перегрев и аномальный шум кабеля и передавать данные на эксплуатационный центр с помощью спутников и мобильной связи. Робот сможет делать анализ изображений из своей базы и сравнивать с более ранней фотографией конкретного места. Кстати, это может снизить риск от растущих деревьев, которые являются причиной отключений электрических линий. Испытания прототипа пройдут в июне 2010 года на действующей линии электропередач в штате Огайо. Кстати. Из фото не очень понятно, как именно будет двигаться робот, как он будет бороться с затруднениями на своем пути: подвесными роликами, перекрещивающимся линиями и т.п. Мы ранее уже писали о роботе, выполняющем аналогичные функции. Японские специалисты экспериментируют с роботом, который может проверять сразу несколько силовых кабелей. Инспекционный робот Expliner анализирует высоковольтную линию электропередач до 500 киловольт в полностью рабочем режиме. Робот похож на четырехколесные тележки, которые катятся сверху провода, как по канатке. |

| Читайте: |
|---|
Теория АСУ:
Технические средства автоматизации производств История развития технических средств автоматизации а также сформировавшаяся структура определяющаяся их назначением. Средства формирования, передачи, первичной обработки и автоматического извлечения... |
Подсистема ввода/вывода Подсистема ввода/вывода – состоит из аппаратных модулей ввода/вывода. Модули различаются по типу электрического сигнала (с помощью которого они взаимодействуют с полевыми приборами) и по направлению... |
Инерция Самые современные материалы и технологии позволяют лишь сократить инерцию. При стандартной автоматике ее минимизирует использование котлов со стальным теплообменником. Основным недостатком их явл... |
Эффективность внедрения автоматизированных систем В условиях рыночной экономики основой успешной деятельности любого предприятия (организации, фирмы и т.п.) является обеспечение требуемого уровня рентабельности его хозяйственной деятельности. Не ме... |
Классификация АСУ ТП В зарубежной литературе можно встретить довольно интересную классификацию АСУ ТП, в соответствие с которой все АСУ ТП делятся на три глобальных класса: • SCADA (Supervisory Control and Data Acqui... |
Оборудования в АСУ:
Многокомпонентное дозирование в приготовлении комбикорм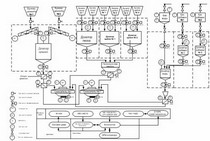 Недавно началась промышленная эксплуатация завода ЗАО «Неокорм» по производству премиксов в г. Лакинск Владимирской области.[1] ... |
Некоторые особенности дозаторов Дозаторы инертных материалов песка и щебня (рис.3.) имеют ряд особенностей. Дозирующие заслонки установлены на раме с возможнос... |
Управление процессом:
Типовая АСУ ТП комбикормового завода. Автоматизация ком Данная АСУ ТП охватывает все технологические процессы комбикормового завода – от стадий загрузки расходных бункеров, точного доз... |
Автоматизированная система управления транспортировкой Типовое решение для элеваторов и силосных корпусов Назначение Создание автоматизированных систем управления процессами тр... |